Symbol Synchronizer
Correct symbol timing clock skew
- Library:
Communications Toolbox / Synchronization
Description
The Symbol Synchronizer block corrects symbol timing clock skew for PAM, PSK, QAM, or OQPSK modulation schemes between a single-carrier transmitter and receiver. For more information, see Symbol Synchronization Overview.
Note
The input signal operates on a sample rate basis, while the output signal operates on a symbol rate basis.
Ports
Input
Output
Parameters


Block Characteristics
Data Types |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
More About
Symbol Synchronization Overview
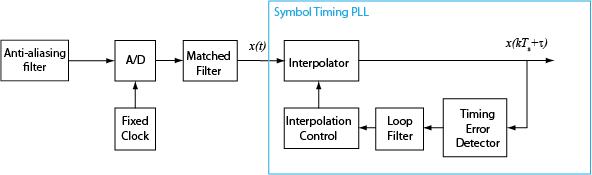
The symbol timing synchronizer algorithm is based on a phased lock loop (PLL) algorithm that consists of four components:
A timing error detector (TED)
An interpolator
An interpolation controller
A loop filter
For OQPSK modulation, the in-phase and quadrature signal components are first aligned (as in QPSK modulation) using a state buffer to cache the last half symbol of the previous input. After initial alignment, the remaining synchronization process is the same as for QPSK modulation.
This block diagram shows an example of a timing synchronizer. In the figure, the symbol timing PLL operates on x(t), the received sample signal after matched filtering. The symbol timing PLL outputs the symbol signal, , after correcting for the clock skew between the transmitter and receiver.
Interpolator
The time delay is estimated from the fixed-rate samples of the matched filter, which are asynchronous with the symbol rate. Because the resulting samples are not aligned with the symbol boundaries, an interpolator is used to "move" the samples. Because the time delay is unknown, the interpolator must be adaptive. Moreover, because the interpolant is a linear combination of the available samples, it can be thought of as the output of a filter.

The interpolator uses a piecewise parabolic interpolator with a Farrow structure and coefficient α set to 1/2 (see Rice, Michael, Digital Communications: A Discrete-Time Approach).
Interpolation Control
Interpolation control provides the interpolator with the basepoint index and fractional interval. The basepoint index is the sample index nearest to the interpolant. The fractional interval is the ratio of the time between the interpolant and its basepoint index and the interpolation interval.

Interpolation is performed for every sample, and a strobe signal is used to determine if the interpolant is output. The synchronizer uses a modulo-1 counter interpolation control to provide the strobe and the fractional interval for use with the interpolator.
Loop Filter
The synchronizer uses a proportional-plus integrator (PI) loop filter. The proportional gain, K1, and the integrator gain, K2, are calculated by
and
The interim term, θ, is given by
where:
N is the number of samples per symbol.
ζ is the damping factor.
BnTs is the normalized loop bandwidth.
Kp is the detector gain.

References
[1] Rice, Michael. Digital Communications: A Discrete-Time Approach. Upper Saddle River, NJ: Prentice Hall, 2008.
[2] Mengali, Umberto and Aldo N. D’Andrea. Synchronization Techniques for Digital Receivers. New York: Plenum Press, 1997.