Model Coverage for MATLAB Functions
About Model Coverage for MATLAB Functions
The Simulink® Coverage™ software simulates a Simulink model and reports model coverage data for the decisions and conditions of code in MATLAB Function blocks. Model coverage only supports coverage for MATLAB® functions configured for code generation.
For example, consider the following if statement:
if (x > 0 || y > 0) reset = 1;
The if statement contains a decision with
two conditions (x > 0 and y > 0).
The Simulink
Coverage software verifies that
all decisions and conditions are
taken during the simulation of the model.
Types of Model Coverage for MATLAB Functions
The types of model coverage that the Simulink Coverage software records for MATLAB functions configured for code generation are:
Decision Coverage
During simulation, the following MATLAB Function block statements are tested for decision coverage:
Function header — Decision coverage is 100% if the function or local function is executed.
if— Decision coverage is 100% if theifexpression evaluates totrueat least once, andfalseat least once.switch— Decision coverage is 100% if everyswitchcase is taken, including the fall-through case.for— Decision coverage is 100% if the equivalent loop condition evaluates totrueat least once, andfalseat least once.while— Decision coverage is 100% if the equivalent loop condition evaluates totrueat least once, and evaluates tofalseat least once.
Condition and MCDC Coverage
During simulation, in the MATLAB Function block function, the following logical conditions are tested for condition and MCDC coverage:
ifstatement conditionsLogical expressions in assignment statements
Simulink Design Verifier Coverage
The following MATLAB functions are active in code generation and in Simulink Design Verifier™:
sldv.condition(Simulink Design Verifier)sldv.test(Simulink Design Verifier)sldv.assume(Simulink Design Verifier)sldv.prove(Simulink Design Verifier)
When you specify the Objectives and Constraints coverage metric in the Coverage pane of the Configuration Parameters dialog box, the Simulink Coverage software records coverage for these functions.
Each of these functions evaluates an expression expr,
for example, sldv.test(,
where expr)expr is a valid Boolean MATLAB expression. Simulink
Design Verifier coverage
measures the number of time steps that the expression expr evaluates
to true.
If expr is true for
at least one time step, Simulink
Design Verifier coverage for that
function is 100%. Otherwise, the Simulink
Coverage software
reports coverage for that function as 0%.
For an example of coverage data for Simulink Design Verifier functions in a coverage report, see Simulink Design Verifier Coverage.
Relational Boundary Coverage
If the MATLAB function block contains a relational operation, the relational boundary coverage metric applies to this block.
If the MATLAB function block calls functions containing
relational operations multiple times, the relational boundary coverage
reports a cumulative result over all
instances where the function is called. If a relational operation
in the function uses operands of different types in the different
calls, relational boundary coverage uses tolerance rules for the stricter
operand type. For instance, if a relational operation uses int32 operands
in one call, and double operands in another call,
relational boundary coverage uses tolerance rules for double operands.
For information on the tolerance rules and the order of strictness of types, see Relational Boundary Coverage.
How to Collect Coverage for MATLAB Functions
When you simulate your model, the Simulink Coverage software can collect coverage data for MATLAB functions configured for code generation. You enable model coverage from the Coverage app.
You collect model coverage for MATLAB functions as follows:
Functions in a MATLAB Function block
Functions in an external MATLAB file
To collect coverage for an external MATLAB file, Coverage pane of the Configuration Parameters dialog box, select Coverage for MATLAB files.
Simulink Design Verifier functions:
sldv.condition(Simulink Design Verifier)sldv.test(Simulink Design Verifier)sldv.assume(Simulink Design Verifier)sldv.prove(Simulink Design Verifier)
To collect coverage for these functions, on the Coverage pane of the Configuration Parameters dialog box, select the Objectives and Constraints coverage metric.
The following section provides model coverage examples for each of these situations.
Examples: Model Coverage for MATLAB Functions
Model Coverage for MATLAB Function Blocks
Simulink Coverage software measures model coverage for functions in a MATLAB Function block.
The following model contains two MATLAB functions in its MATLAB Function block:
In the Configuration Parameters dialog box, on the Solver pane, under Solver selection, the simulation parameters are set as follows:
Type —
Fixed-stepSolver —
discrete (no continuous states)Fixed-step size (fundamental sample time) —
1
The MATLAB Function block contains two functions:
The top-level function,
run_intersect_test, sends the coordinates for two rectangles, one fixed and the other moving, as arguments torect_intersect.The local function,
rect_intersect, tests for intersection between the two rectangles. The origin of the moving rectangle increases by1in thexandydirections with each time step.
The coordinates for the origin of the moving test rectangle are represented by
persistent data x1 and y1, which are both
initialized to -1. For the first sample, x1
and y1 both increase to 0. From then on, the
progression of rectangle arguments during simulation is as shown in the following
graphic.
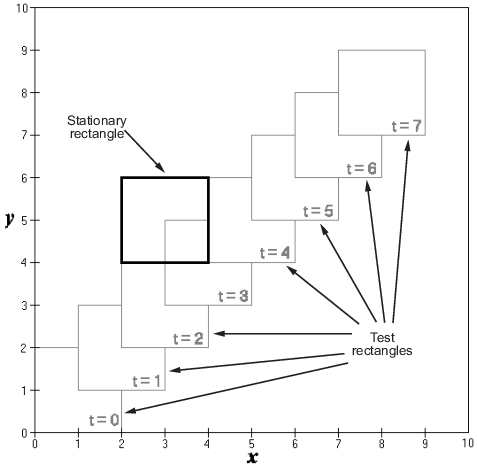
The fixed rectangle is shown in bold with a lower-left origin of
(2,4) and a width and height of 2. At time t =
0, the first test rectangle has an origin of (0,0)
and a width and height of 2. For each succeeding sample, the origin of the test
rectangle increments by (1,1). The rectangles at sample times
t = 2, 3, and 4
intersect with the test rectangle.
The local function rect_intersect checks to see if its two
rectangle arguments intersect. Each argument consists of coordinates for the
lower-left corner of the rectangle (origin), and its width and height.
x values for the left and right sides and
y values for the top and bottom are calculated for each
rectangle and compared in nested if-else decisions. The function
returns a logical value of 1 if the rectangles intersect and 0 if they do
not.
Scope output during simulation, which plots the return value against the sample
time, confirms the intersecting rectangles for sample times 2,
3, and 4 .

After the simulation, the model coverage report appears in a browser window. After the summary in the report, the Details section of the model coverage report reports on each parts of the model.
The model coverage report for the MATLAB Function block shows that the block itself has no decisions of its own apart from its function.
The following sections examine the model coverage report for the example model in reverse function-block-model order. Reversing the order helps you make sense of the summary information at the top of each section.
Coverage for the MATLAB Function run_intersect_test. Model coverage for the MATLAB Function block function
run_intersect_test appears under the linked name of the
function. Clicking this link opens the function in the editor.
Below the linked function name is a link to the model coverage report for the
parent MATLAB Function block that contains the code for
run_intersect_test.
The top half of the report for the function summarizes its model coverage
results. The coverage metrics for run_intersect_test include
decision, condition, and MCDC coverage. You can best understand these metrics by
examining the code for run_intersect_test.

Lines with coverage elements are marked by a highlighted line number in the listing:
Line 1 receives decision coverage on whether the top-level function
run_intersect_testis executed.Line 6 receives decision coverage for its
ifstatement.Line 14 receives decision coverage on whether the local function
rect_intersectis executed.Lines 27 and 30 receive decision, condition, and MCDC coverage for their
ifstatements and conditions.Each of these lines is the subject of a report that follows the listing.
The condition
right1 < left2in line 30 is highlighted in red. This means that this condition was not tested for all of its possible outcomes during simulation. Exactly which of the outcomes was not tested is in the report for the decision in line 30.
The following sections display the coverage for each
run_intersect_test decision line. The coverage for each
line is titled with the line itself, which if clicked, opens the editor to the
designated line.
Coverage for Line 1. The coverage metrics for line 1 are part of the coverage data for the function
run_intersect_test.
The first line of every MATLAB function configured for code generation receives coverage analysis
indicative of the decision to run the function in response to a call. Coverage
for run_intersect_test indicates that it executed at least
once during simulation.
Coverage for Line 6. The Decisions analyzed table indicates that the decision
in line 6, if isempty(x1), executed a total of eight times.
The first time it executed, the decision evaluated to true,
enabling run_intersect_test to initialize the values of its
persistent data. The remaining seven times the decision executed, it evaluated
to false. Because both possible outcomes occurred, decision
coverage is 100%.
Coverage for Line 14. The Decisions analyzed table indicates that the local
function rect_intersect executed during testing, thus
receiving 100% coverage.
Coverage for Line 27. The Decisions analyzed table indicates that there are two
possible outcomes for the decision in line 27: true and
false. Five of the eight times it was executed, the
decision evaluated to false. The remaining three times, it
evaluated to true. Because both possible outcomes occurred,
decision coverage is 100%.
The Conditions analyzed table sheds some additional light
on the decision in line 27. Because this decision consists of two conditions
linked by a logical OR (||) operation, only one condition
must evaluate true for the decision to be
true. If the first condition evaluates to
true, there is no
need to evaluate the second condition. The first condition, top1 <
bottom2, was evaluated eight times, and was
true twice. This means that the second condition was
evaluated only six times. In only one case was it true, which
brings the total true occurrences for the decision to three,
as reported in the Decisions analyzed table.
MCDC coverage looks for decision reversals that occur because one condition
outcome changes from T to F or from
F to T. The MCDC
analysis table identifies
all possible combinations of outcomes for
the conditions that lead to a reversal in the decision. The character
x is used to indicate a condition outcome that is
irrelevant to the decision reversal. Decision-reversing condition outcomes that
are not achieved during simulation are marked with a set of parentheses. There
are no parentheses, therefore
all decision-reversing outcomes occurred
and MCDC coverage is complete for the decision in line 27.
Coverage for Line 30. The line 30 decision, if (right1 < left2 || right2 <
left1), is nested in the if statement of the
line 27 decision and is evaluated only if the line 27 decision is
false. Because the line 27 decision evaluated
false five times, line 30 is evaluated five times, three
of which are false. Because both the true
and false outcomes are achieved, decision coverage for line
30 is 100%.
Because line 30, like line 27, has two conditions related by a logical OR
operator (||), condition 2 is tested only if condition 1 is
false. Because condition 1 tests false
five times, condition 2 is tested five times. Of these, condition 2 tests
true two times and false three times,
which accounts for the two occurrences of the true outcome
for this decision.
Because the first condition of the line 30 decision does not test
true, both outcomes do not occur for that condition and
the condition coverage for the first condition is highlighted with a rose color.
MCDC coverage is also highlighted in the same way for a decision reversal based
on the true outcome for that condition.
Coverage for run_intersect_test. On the Details tab, the metrics that summarize coverage
for the entire run_intersect_test function are reported and
repeated as shown.
The results summarized in the coverage metrics summary can be expressed in the following conclusions:
There are eight decision outcomes reported for
run_intersect_testin the line reports:One for line 1 (executed)
Two for line 6 (
trueandfalse)One for line 14 (executed)
Two for line 27 (
trueandfalse)Two for line 30 (
trueandfalse).
The decision coverage for each line shows 100% decision coverage. This means that decision coverage for
run_intersect_testis eight of eight possible outcomes, or 100%.There are four conditions reported for
run_intersect_testin the line reports. Lines 27 and 30 each have two conditions, and each condition has two condition outcomes (trueandfalse), for a total of eight condition outcomes inrun_intersect_test. All conditions tested positive for both thetrueandfalseoutcomes except the first condition of line 30 (right1 < left2). This means that condition coverage forrun_intersect_testis seven of eight, or 88%.The MCDC coverage tables for decision lines 27 and 30 each list two cases of decision reversal for each condition, for a total of four possible reversals. Only the decision reversal for a change in the evaluation of the condition
right1 < left2of line 30 fromtruetofalsedid not occur during simulation. This means that three of four, or 75% of the possible reversal cases were tested for during simulation, for a coverage of 75%.
Model Coverage for MATLAB Functions in an External File
Using the same model in Model Coverage for MATLAB Function Blocks,
suppose the MATLAB functions run_intersect_test and rect_intersect are
stored in an external MATLAB file named run_intersect_test.m.
To collect coverage for MATLAB functions in an external file, on the Coverage pane of the Configuration Parameters dialog box, select Coverage for MATLAB files.
After simulation, the model coverage report summary contains sections for the top-level model and for the external function.
The model coverage report for run_intersect_test.m reports
the same coverage data as if the functions were stored in the MATLAB
Function block.
For a detailed example of a model coverage report for a MATLAB function in an external file, see External MATLAB File Coverage Report.
Model Coverage for Simulink Design Verifier MATLAB Functions
If the MATLAB code includes any of the following Simulink Design Verifier functions configured for code generation, you can measure coverage:
sldv.condition(Simulink Design Verifier)sldv.test(Simulink Design Verifier)sldv.assume(Simulink Design Verifier)sldv.prove(Simulink Design Verifier)
For this example, consider the following model that contains a MATLAB Function block.

The MATLAB Function block contains the following code:
function y = fcn(u) % This block supports MATLAB for code generation. sldv.condition(u > -30) sldv.test(u == 30) y = 1;
To collect coverage for Simulink Design Verifier MATLAB functions, on the Coverage pane in the Configuration Parameters dialog box, under Other metrics, select Objectives and Constraints.
After simulation, the model coverage report listed coverage
for the sldv.condition and sldv.test functions.
For sldv.condition, the expression u >
-30 evaluated to true 51 times. For sldv.test,
the expression u == 30 evaluated to true 51
times.
For an example of model coverage data for Simulink Design Verifier blocks, see Objectives and Constraints Coverage.