Component Verification in Target Environment
After you generate production code for a component design, you need to integrate, compile, link, and deploy the code as a complete application on the embedded system. One approach is to manually integrate the code into an existing software framework that consists of an operating system, device drivers, and support utilities. The algorithm can include externally written legacy or custom code.
An easier approach to verifying a component in a target environment is to use processor-in-the-loop (PIL) simulation. For information about PIL simulations, see SIL and PIL Simulations.
Goals of Component Verification
Assuming that you have generated production source code and integrated required externally written code, such as drivers and a scheduler, you can verify that the integrated software operates as expected by testing it in the target environment. During testing, you can achieve either of the following goals, depending on whether you export code that is strictly ANSI® C/C++ or mixes ANSI C/C++ with code optimized for a target environment.
| Goal | Type of Code Export |
|---|---|
| Maximize code portability and configurability | ANSI C/C++ |
| Simplify integration and maximize use of processor resources and code efficiency | Mixed code |
Regardless of your goal, you must integrate required external drivers and scheduling software. To achieve real-time execution, you must integrate the real-time scheduling software.
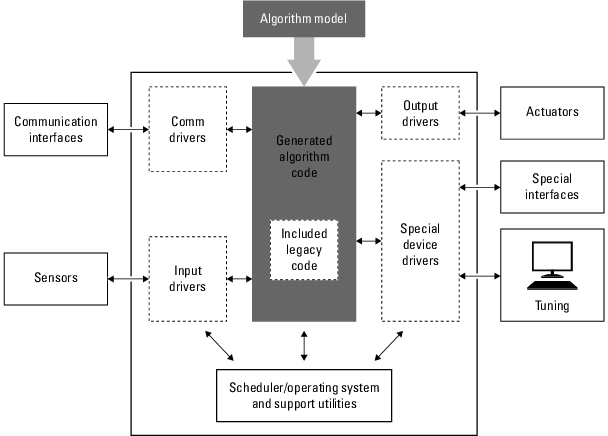
To maximize code portability and configurability, limit the application code to ANSI/ISO® C or C++ code only, as the following figure shows.
To simplify code integration and maximize code efficiency for a target environment, use Embedded Coder® features for:
Controlling code interfaces
Exporting subsystems
Including target-specific code, including compiler optimizations
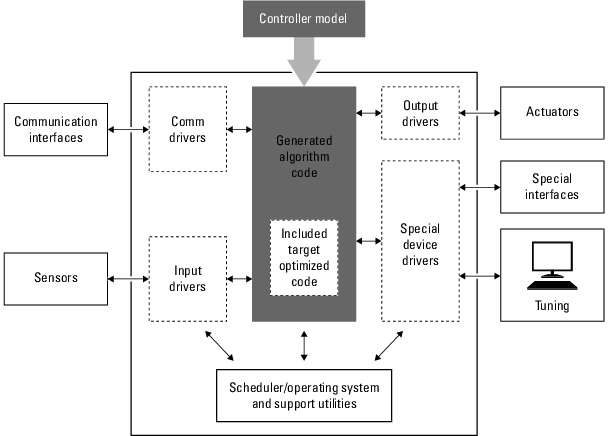
The following figure shows a mix of ANSI C/C++ code with code that is optimized for a target environment.
Run Component Tests
The workflow for running software component tests in the target environment is:
Integrate external code, for example, for device drivers and a scheduler, with the generated C or C++ code for your component model. For more information, see S-Functions and Code Generation. For more specific references that depend on your verification goals, see the following table.
For See ANSI C/C++ code integration Integrate C Functions Using Legacy Code Tool. Also, open rtwdemosand navigate to the Custom Code folder.Mixed code integration Generate Component Source Code for Export to External Code Base and example
rtwdemo_exporting_functionsConfigure C Code Generation for Model Entry-Point Functions, Customize Generated C++ Class Interfaces, and example rtwdemo_fcnprotoctrl
What Is Code Replacement?, What Is Code Replacement Customization?, and example
rtwdemo_crl_script
Simulate the integrated component model.
Generate code for the integrated component model.
Connect to data interfaces for the generated C code data structures. See Exchange Data Between Generated and External Code Using C API and Export ASAP2 File for Data Measurement and Calibration. Also see examples
rtwdemo_capiandrtwdemo_asap2.Customize and control the build process, if required. See Customize Post-Code-Generation Build Processing, and example
rtwdemo_buildinfo.Create a zip file that contains generated code files, static files, and dependent data to build the generated code in an environment other than your host computer. See Relocate Code to Another Development Environment, and example
rtwdemo_buildinfo.