Synchronous Subsystem Behavior with the State Control Block
What Is a State Control Block?
When you have blocks with state, and have enable or reset ports
inside a subsystem, use the Synchronous mode
of the State Control block to:
Provide efficient enable and reset simulation behavior on hardware.
Generate cleaner HDL code and use fewer resources on hardware.
You can add the State Control block to your Simulink® model at any level in the model hierarchy. How you set the State Control block affects the simulation behavior of other blocks inside the subsystem that have state.
For synchronous hardware simulation behavior, set State control to
Synchronous.For default Simulink simulation behavior, set State control to
Classic.
State Control Block Modes
| Functionality | Synchronous mode | Classic mode |
|---|---|---|
| State Control block setting | Default block setting when you add the block from the HDL Subsystems block library. | The simulation behavior is the same as a subsystem that does not use the State Control block. |
Simulink simulation behavior
| The update method only updates states. The output method computes the output values at each time step. For example,
when you have enabled subsystems, the output value changes when the
enable signal is low as it processes new input values. The output
value matches the output from | The update method updates states and computes the output values. For example, when you have enabled subsystems, the output value is held steady when the enable signal is low and changes only when the enable signal becomes high. |
| HDL simulation behavior | More efficient on hardware. | Less efficient on hardware. |
| HDL code generation behavior | Generated HDL code is cleaner and uses fewer resources on hardware. For example, when you have enabled subsystems, HDL Coder™ does not generate bypass registers for each state update and uses fewer hardware resources. | Generated HDL code is not as clean and uses more hardware resources. For example, when you have enabled subsystems, HDL Coder generates bypass registers for each state update and uses more resources. |
To learn more about when you can use the State Control block, see State Control.
Synchronous Badge for Subsystems by Using Synchronous Mode
To see if a subsystem in your Simulink model uses synchronous semantics:
A symbol S is displayed on the subsystem to indicate synchronous behavior.

If you double-click the SynchronousStateControl subsystem, a badge S is displayed in the Simulink editor to indicate that blocks inside the subsystem are using synchronous hardware semantics.

The SynchronousStateControl and ClassicStateControl subsystems
use a Delay block with an external reset and an enable
port in Synchronous and Classic modes
respectively.
Generate HDL Code with the State Control Block
The following table shows a comparison of the HDL code generated
from the Delay block for Classic and Synchronous modes
of the State Control block.
| Functionality | Synchronous mode | Classic mode |
|---|---|---|
HDL code generation. Settings applied:
|
`timescale 1 ns / 1 ns
module SynchronousStateControl
(
clk,
reset,
enb,
DataIn,
EnableIn,
ResetIn,
DataOut
);
input clk;
input reset;
input enb;
input signed [7:0] DataIn; // int8
input EnableIn;
input ResetIn;
output signed [7:0] DataOut; // int8
reg signed [7:0] Delay_Synchronous_reg [0:1]; // sfix8 [2]
wire signed [7:0] Delay_Synchronous_reg_next [0:1]; // sfix8 [2]
wire signed [7:0] Delay_Synchronous_out1; // int8
always @(posedge clk)
begin : Delay_Synchronous_process
if (reset == 1'b1 || ResetIn == 1'b1) begin
Delay_Synchronous_reg[0] <= 8'sb00000000;
Delay_Synchronous_reg[1] <= 8'sb00000000;
end
else begin
if (enb && EnableIn) begin
Delay_Synchronous_reg[0] <= Delay_Synchronous_reg_next[0];
Delay_Synchronous_reg[1] <= Delay_Synchronous_reg_next[1];
end
end
end
assign Delay_Synchronous_out1 = Delay_Synchronous_reg[1];
assign Delay_Synchronous_reg_next[0] = DataIn;
assign Delay_Synchronous_reg_next[1] = Delay_Synchronous_reg[0];
assign DataOut = Delay_Synchronous_out1;
endmodule // SynchronousStateControl
|
`timescale 1 ns / 1 ns
module ClassicStateControl
(
clk,
reset,
enb,
DataIn,
EnableIn,
ResetIn,
DataOut
);
input clk;
input reset;
input enb;
input signed [7:0] DataIn; // int8
input EnableIn;
input ResetIn;
output signed [7:0] DataOut; // int8
reg signed [7:0] Delay_Synchronous_bypass; // sfix8
reg signed [7:0] Delay_Synchronous_reg [0:1]; // sfix8 [2]
wire signed [7:0] Delay_Synchronous_bypass_next; // sfix8
wire signed [7:0] Delay_Synchronous_reg_next [0:1]; // sfix8 [2]
wire signed [7:0] Delay_Synchronous_delay_out; // sfix8
wire signed [7:0] Delay_Synchronous_out1; // int8
always @(posedge clk)
begin : Delay_Synchronous_process
if (reset == 1'b1 || ResetIn == 1'b1) begin
Delay_Synchronous_bypass <= 8'sb00000000;
Delay_Synchronous_reg[0] <= 8'sb00000000;
Delay_Synchronous_reg[1] <= 8'sb00000000;
end
else begin
if (enb && EnableIn) begin
Delay_Synchronous_bypass <= Delay_Synchronous_bypass_next;
Delay_Synchronous_reg[0] <= Delay_Synchronous_reg_next[0];
Delay_Synchronous_reg[1] <= Delay_Synchronous_reg_next[1];
end
end
end
assign Delay_Synchronous_delay_out = (ResetIn == 1'b1 ? 8'sb00000000 :
Delay_Synchronous_reg[1]);
assign Delay_Synchronous_out1 = (EnableIn == 1'b1 ? Delay_Synchronous_delay_out :
Delay_Synchronous_bypass);
assign Delay_Synchronous_bypass_next = Delay_Synchronous_delay_out;
assign Delay_Synchronous_reg_next[0] = DataIn;
assign Delay_Synchronous_reg_next[1] = Delay_Synchronous_reg[0];
assign DataOut = Delay_Synchronous_out1;
endmodule // ClassicStateControl
|
Enable and Reset Hardware Simulation Behavior
Refer to the above Simulink model that shows a Delay block
that uses Classic and Synchronous modes
of the State Control block. The following diagram shows
the ModelSim® simulation behavior for the Delay block.
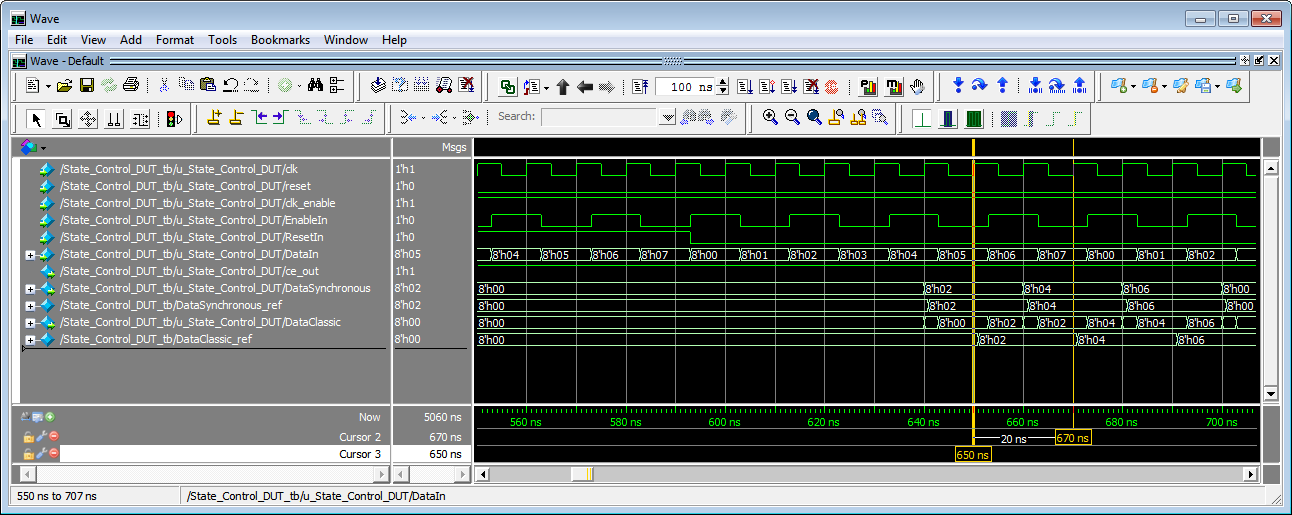
When ResetIn signal is high, the DataClassic and DataSynchronous signals produce the same output.
When both ResetIn and EnableIn signals are low, the DataSynchronous signal holds its value and changes only when the EnableIn signal becomes high at the next active clock edge. The DataClassic signal values change when the EnableIn signal is low as it processes new input values. The DataClassic signal values match the DataSynchronous signal values when the EnableIn becomes high.
For information about how to generate HDL code and simulate your design in ModelSim, see Generate HDL Code from Simulink Model.